
HOME
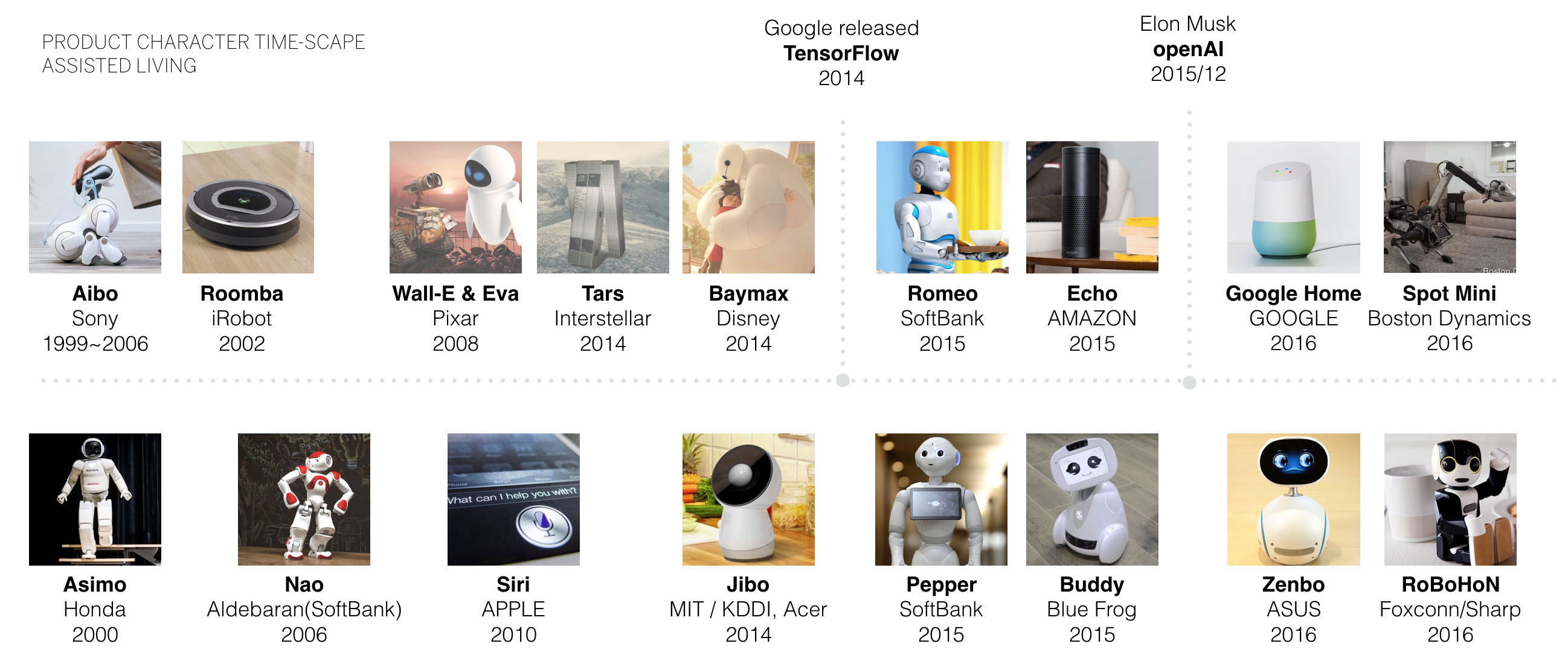
In this provocation and design for air purification robot research project, we combined drone technology, personal indoor air-care and assisted living with the special fibre filter material. We started from our curiosity and were hoping to arrive at a high-level product concept: can we leverage drone technology as a way to create air-flow and to make air purification mobile? What product character should be for an autonomous air purifying drone that seeks proximity to the people in the apartment? Should it simply be 'a device' like roomba, or is it appropriate to be given 'a personality' with simple social characteristics like assisted living devices and robots have?
5 robot types
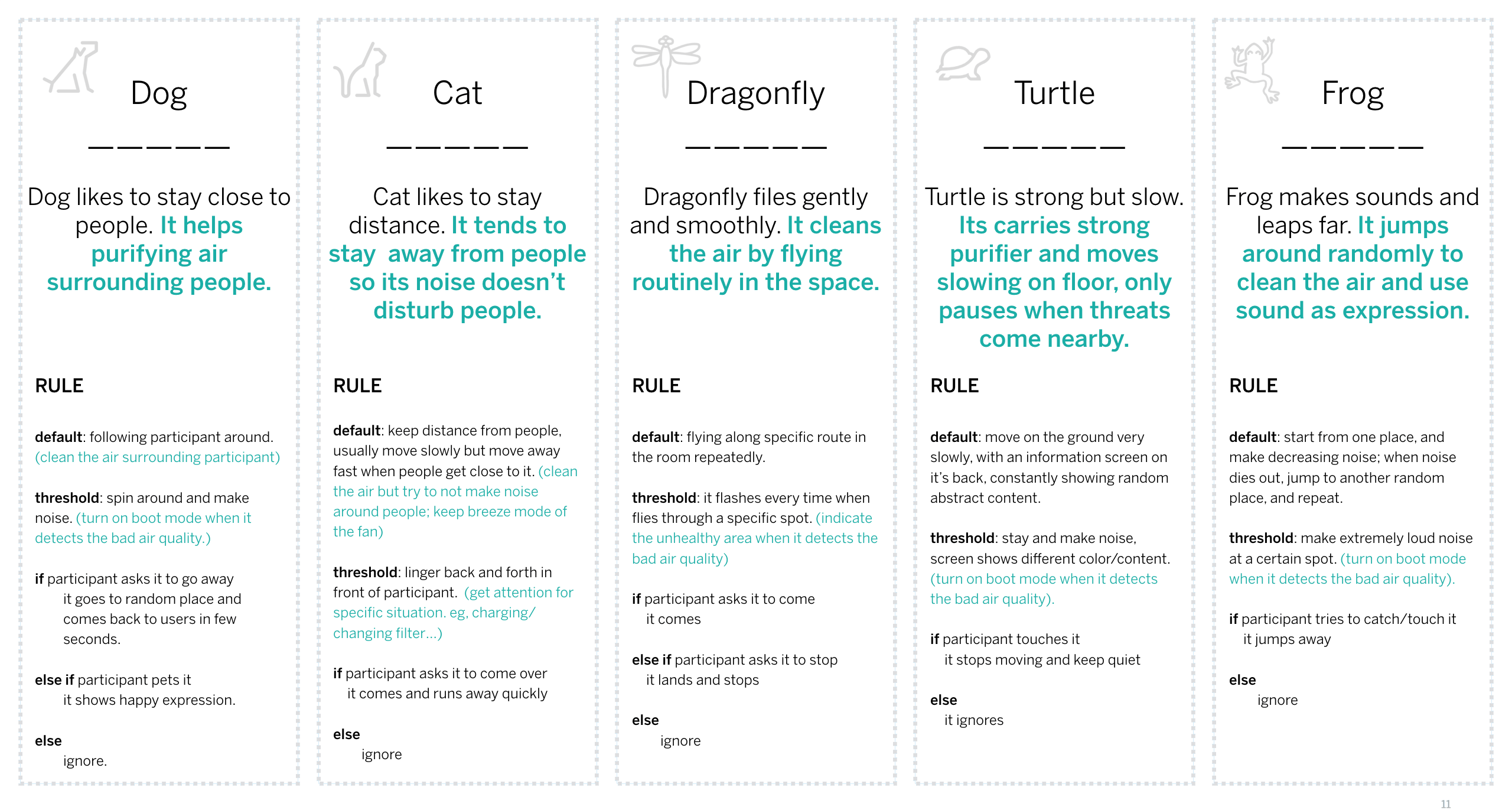
We summarized few categories of robotic features from market trends and available technology, and consolidated the attributes into 5 robot types.
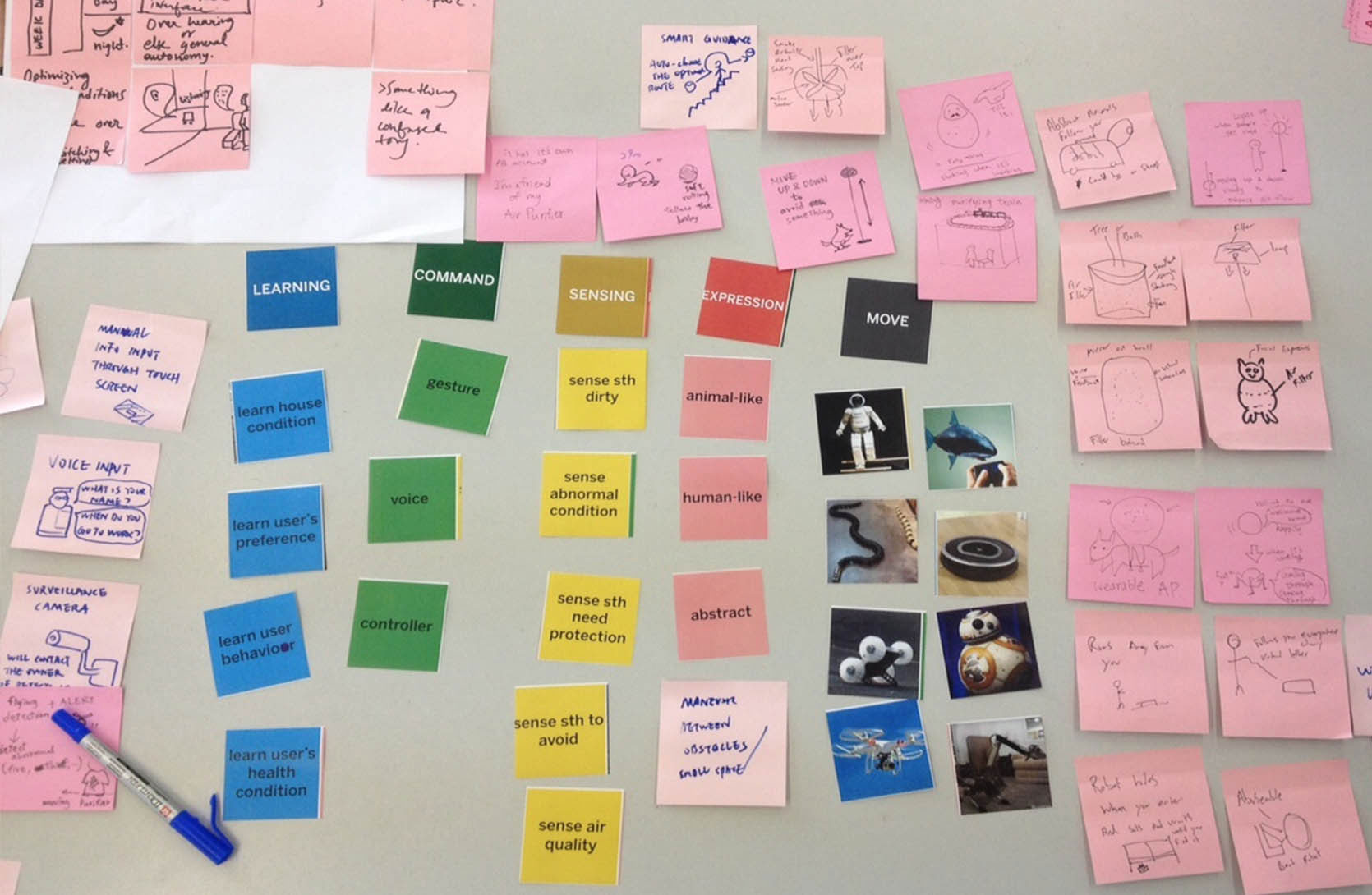
Each type was designated a distinct characteristic with specific behavior and expression, which enhance it's characteristic.
Prototyping
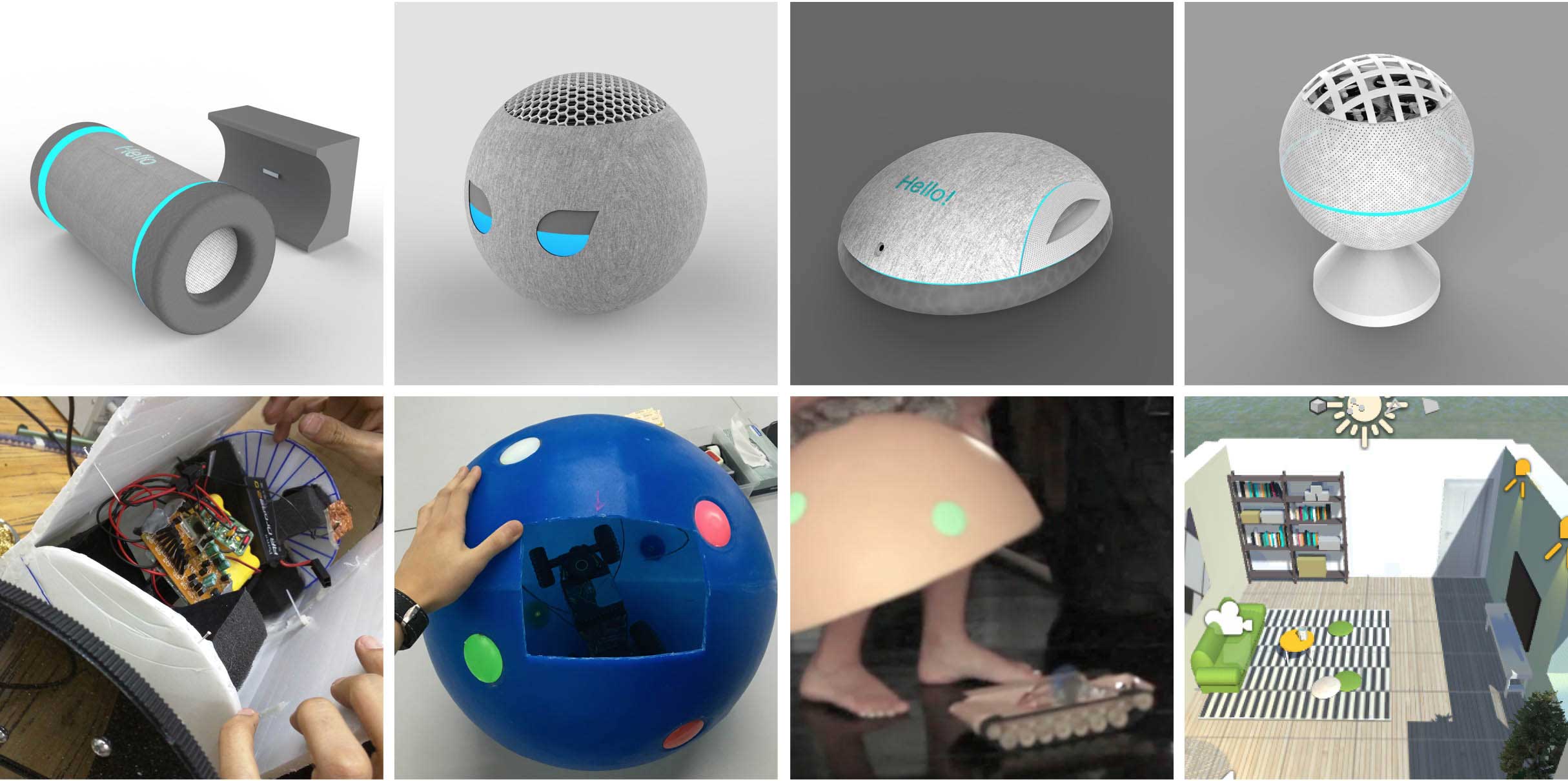
Experimental prototypes for research provocation is a way to test out participants' hidden reaction of concepts. And observing how participants interaction with the prototypes insipred our design iteration. We built the prototypes including VR simulation and tested with users to understand how people perceive the new invention and how that reconstruct the interaction.
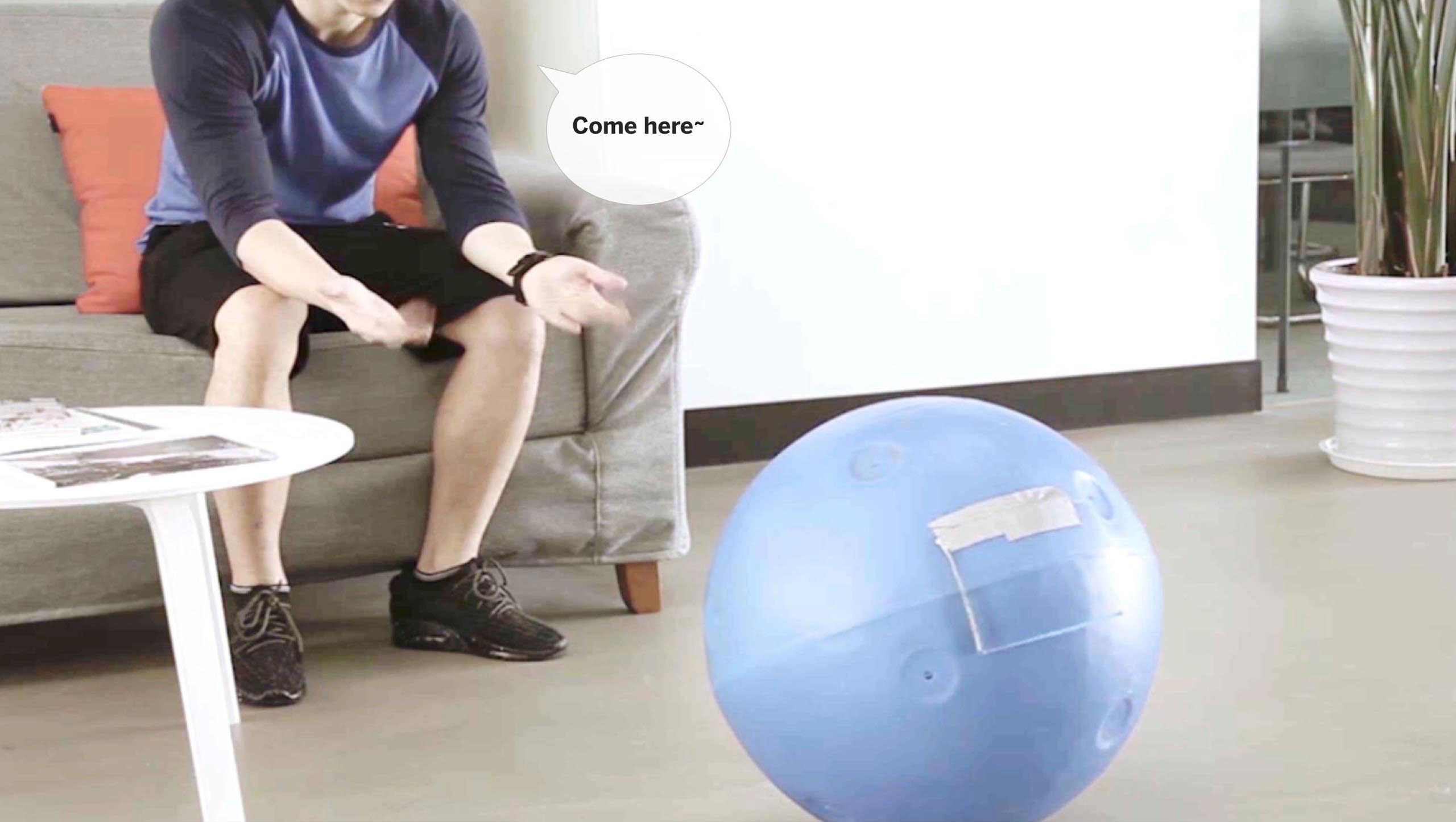
Research and testing
 During the interview with participants in an apartment, we helped participants imaging that they are going back home, and sent out the prototyping robots coming from the other room. We recorded all the action and especially captured the first reaction on participants' face.
During the interview with participants in an apartment, we helped participants imaging that they are going back home, and sent out the prototyping robots coming from the other room. We recorded all the action and especially captured the first reaction on participants' face.





From the study, we found that people tend to associate moving robot with living object, therefore moving is not only a functional feature, but an emotional one. However, a friendly gesture might cause negative interpretation in poor designed, and it takes time for people to understand a new object with behavior. We also found that although people have high expectation on robots, they also empathize clumsy objects. They have more tolerance if the robot acts less aggressive, and we could make users better facilitators who help robots get smarter in a mutual learning process.